近期,实验室博士生尹立远为第一作者,实验室教师吴承伟作为通讯作者的论文“Security Analysis And Control under Periodic DoS Attacks”已被国际期刊IEEE Internet of Things Journal录用。
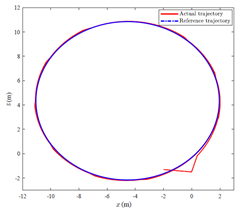
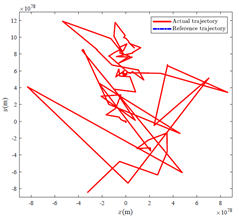
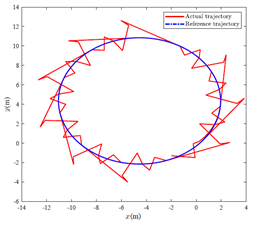
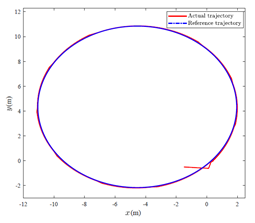
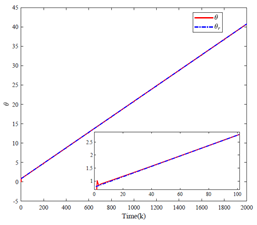
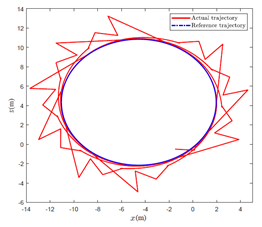
该论文研究了控制器与执行器之间的通信网络受到周期型拒绝服务攻击情形下信息物理系统的安全性分析与控制问题。论文通过建立有无拒绝服务攻击时Lyapunov函数差分之间的关系解决上述问题。首先,给出了周期型拒绝服务攻击下闭环系统指数稳定的充分条件,计算出了攻击周期的临界值,低于该临界值,系统的稳定性将会被破坏。其次,建立了所提出条件与强化学习控制算法之间的关联,基于此可以评估强化学习控制的安全性。最后,在统一框架下考虑了周期型拒绝服务攻击与外部扰动,提出了评估闭环信息物理系统安全性的充分条件并设计了安全控制器。最后利用轮式移动机器人仿真平台验证了所提算法的有效性。
Abstract
This paper is focused on security analysis and control problems of cyber-physical systems under denial-of-service (DoS) attacks, which jam the controller-actuator channel. Considering the limited attack energy of malicious adversaries, DoS attacks are described by a periodic model. Different from existing results, both the security analysis and secure controller design problems are addressed based on the characteristics of DoS attack model rather than utilizing the switching system theory to solve the aforementioned problems. Firstly, sufficient conditions are derived to ensure that the resultant closed-loop cyber-physical system under DoS attacks can preserve the exponential stability, and the critical value of the attack period is derived, below which the stability is deteriorated. Secondly, the relation between our proposed conditions and reinforcement learning based control is established, based on which the security of reinforcement learning based control can be evaluated effectively. Lastly, both DoS attacks and external disturbances are considered in a unified framework, and sufficient conditions are proposed to evaluate the security of the closed-loop cyber-physical systems and design a secure controller. Finally, a mobile robot is adopted to validate the efficacy of the proposed methods.