平台简介:
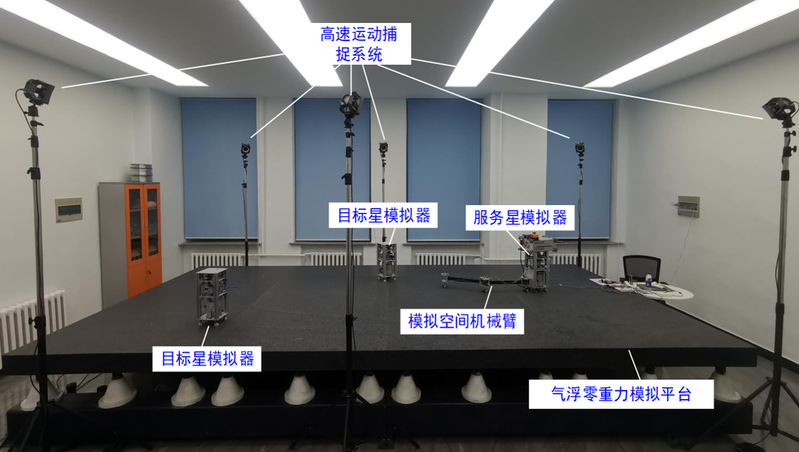
气浮式空间模拟系统主要针对空间飞行器控制、零重力模拟、空间编队及精密测量等场景开展验证工作。该平台主体由3*6米的超平大理石平台构成,包含调平及隔振附件、6台卫星模拟器、双臂空间机器人、空间绳系缠绕机构等部分构成。同时,该平台结合“高速目标运动光学跟踪系统”,可以开启“上帝视角”对试验结果进行验证。
开展试验:
空间飞行器五自由度姿轨控验证 —— 对空间飞行器姿态控制算法及姿轨控一体化算法进行地面验证
在轨交会对接实验 —— 验证了空间飞行器轨道交会对接的控制过程
在轨分离实验 —— 验证了空间飞行器在轨分离的控制过程
三体及多体空间绳系卫星释放、回收试验验证 —— 验证了空间绳系卫星张力释放回收及绳牵编队控制算法
空间双臂机器人协同柔性抓捕验证 —— 对空间服务机器人自由悬浮状态下的机械臂轨迹规划及力位混合控制算法进行了验证
空间结构等效缩比控制验证 —— 通过等效缩比实验的方法验证大型空间结构的展开、姿态控制、振动抑制
空间多星编队试验验证 —— 验证了多星编队队形保持算法