近期,实验室教师邵翔宇作为第一作者,吴立刚教授作为通信作者的论文“Model-based Control for Soft Robots with System Uncertainties and Input Saturation”已被国际权威期刊“IEEE Transactions on Industrial Electronics”录用。
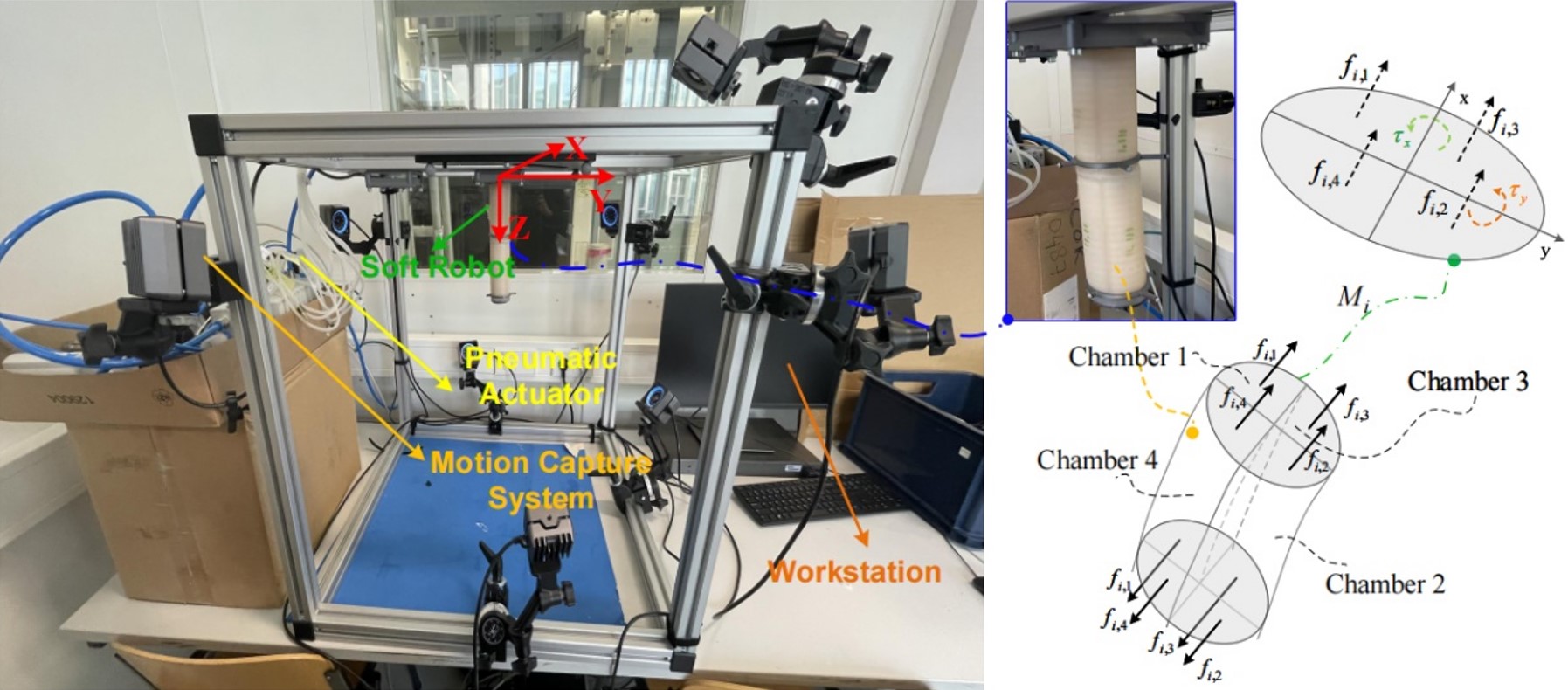
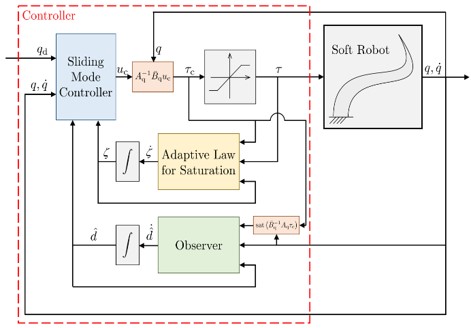
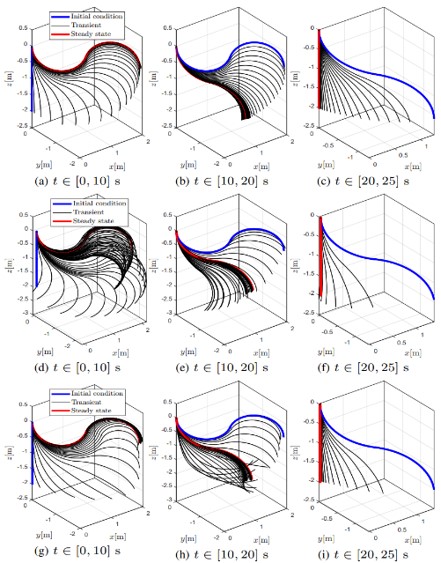
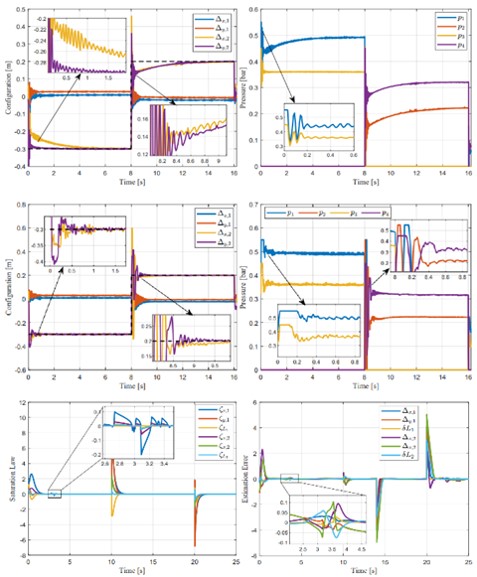
该论文提出一种基于模型的鲁棒控制策略,实现具有系统不确定性和输入饱和的软体机器人形状控制,解决了软体机器人有限维模型本质不准确、驱动空间受限的问题。首先,设计了有限时间观测器来估计理论模型和实际软机器人之间的偏差。其次,引入滑模控制器来调节软机器人形状,同时满足饱和约束。该控制器使用观测器的输出来补偿实际系统与建立的模型之间的偏差。理论分析证明了闭环系统的收敛性,仿真和实验验证了该方法的有效性。
Abstract
Model-based strategies are a promising solution to the grand challenge of equipping continuum soft robots with motor intelligence. However, finite-dimensional models of these systems are inherently inaccurate, thus posing pressing robustness concerns. Moreover, the actuation space of soft robots is usually limited. This paper aims at solving both these challenges by proposing a robust model-based strategy for the shape control of soft robots with system uncertainty and input saturation. The proposed architecture is composed of two key components. First, we propose an observer that estimates deviations between the theoretical model and the soft robot, ensuring that the estimation error converges to zero within finite time. Second, we introduce a sliding mode controller to regulate the soft robot shape while fulfilling saturation constraints. This controller uses the observer's output to compensate for the deviations between the real system and the established model. We prove the convergence of the closed-loop with theoretical analysis and the method's effectiveness with simulations and experiments.