近期,实验室教师吴承伟为第一作者,吴立刚教授作为通讯作者的论文“A Secure Robot Learning Framework for Cyber Attack Scheduling And Countermeasure”已被机器人领域权威期刊IEEE Transactions on Robotics以Regular Paper形式录用。
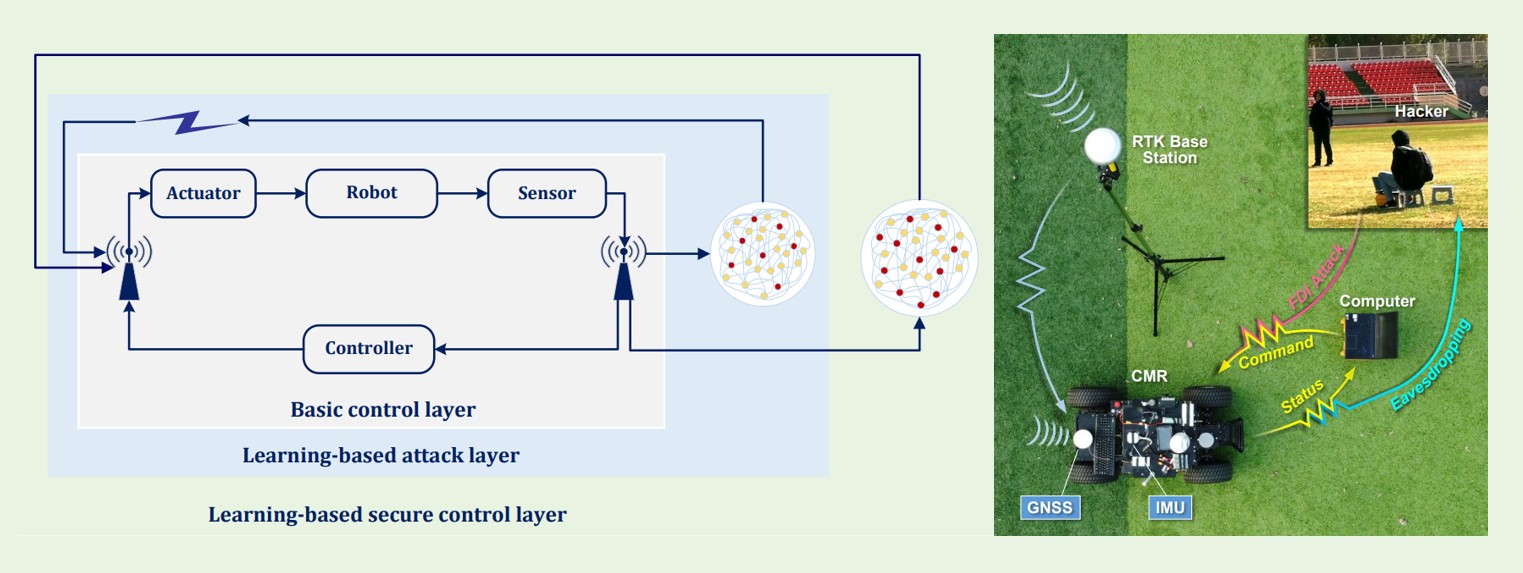
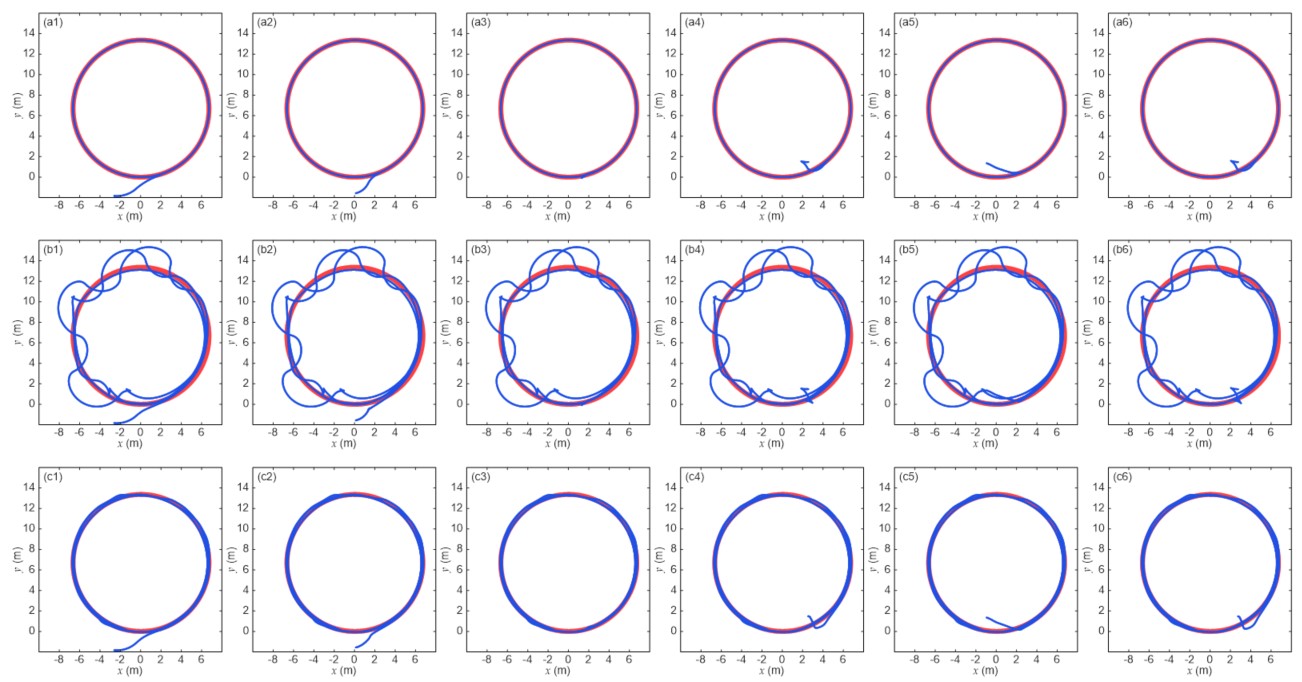
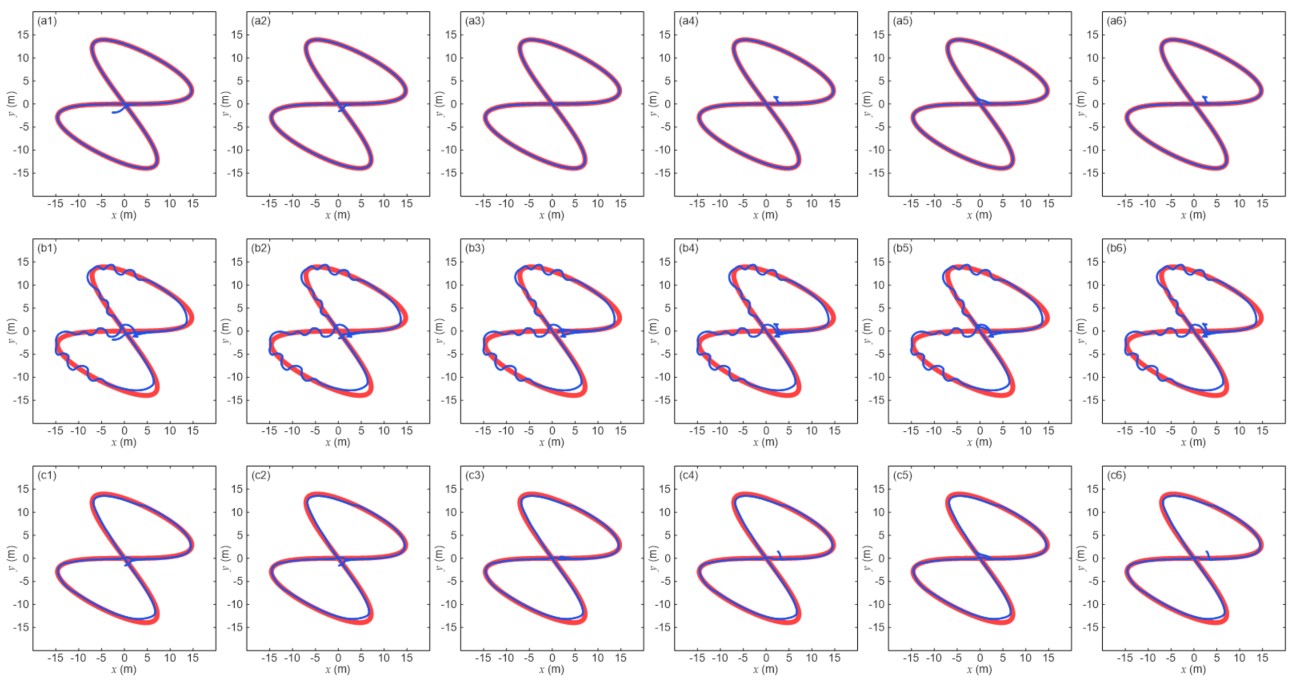
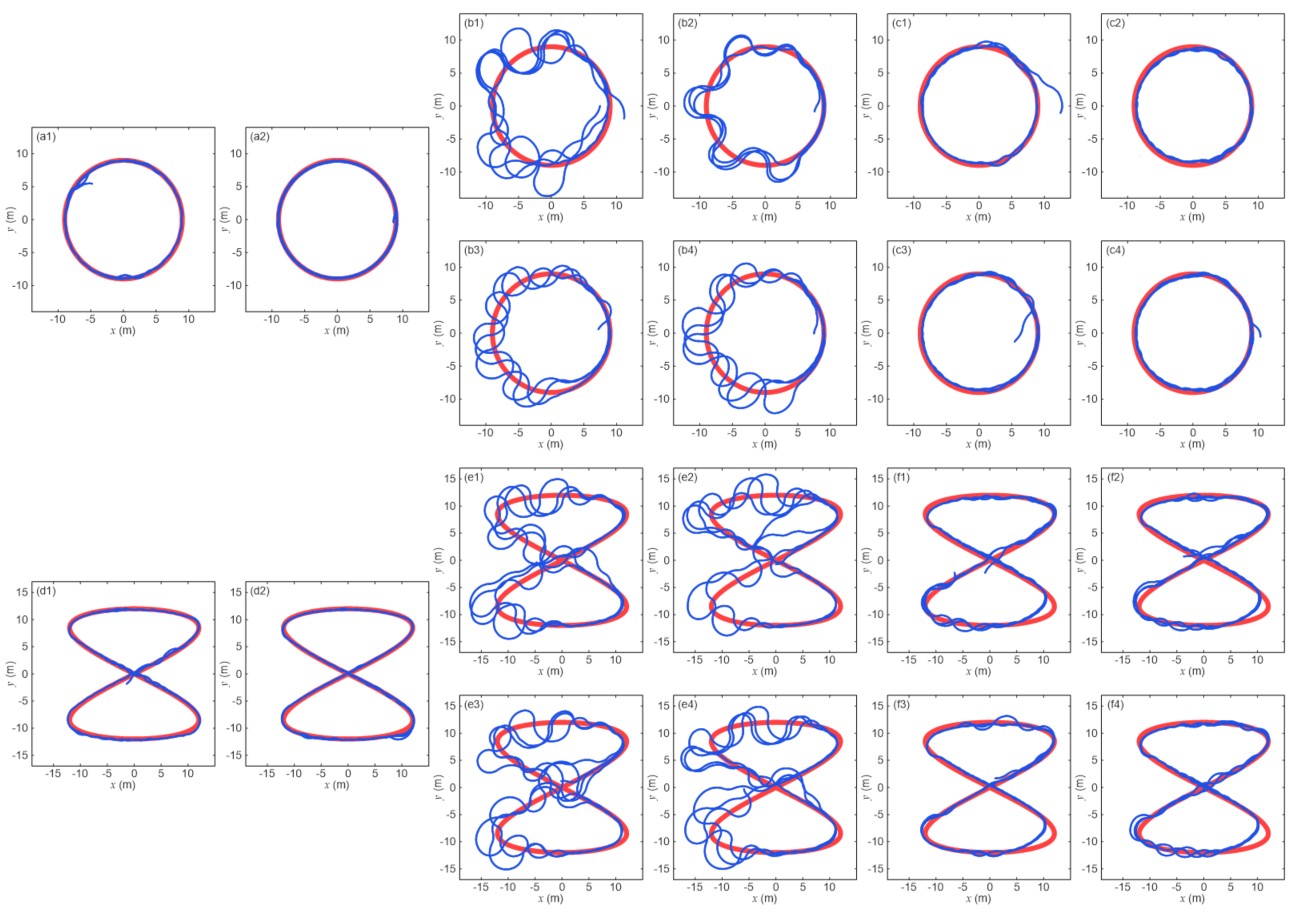
该论文以车式移动机器人为例,研究了基于深度强化学习的最优虚假数据注入攻击设计与安全控制问题。首先,根据虚假数据注入攻击目标与攻击约束,定义了最优虚假数据注入攻击设计问题,提出了基于深度强化学习的最优攻击设计算法,该算法可以直接对非线性模型进行攻击设计,避免了攻击下线性模型无法真实反映系统动态、进而导致攻击算法失效的问题。其次,提出了基于Lyapunov函数约束的安全控制算法,该算法不仅能够缓解最优攻击对系统的安全威胁,还可以有效应对非最优的攻击形式。最后,通过计算机仿真和实验验证了本文方法的有效性和优势。
Abstract
The problem of learning-based control for robots has been extensively studied, whereas the security issue under malicious adversaries has not been paid much attention to. Malicious adversaries can invade intelligent devices and communication networks used in robots, causing incidents, achieving illegal objectives, and even injuring people. This paper first investigates the problems of optimal false data injection attack scheduling and countermeasure design for car-like robots in the framework of deep reinforcement learning. Using a state-of-the-art deep reinforcement learning approach, an optimal false data injection attack scheme is proposed to deteriorate the tracking performance of a robot, guaranteeing the trade-off between the attack efficiency and the limited attack energy. Then, an optimal tracking control strategy is learned to mitigate attacks and recover the tracking performance. More importantly, a theoretical stability guarantees of a robot using the learning-based secure control scheme is achieved.Both simulated and real-world experiments are conducted to show the effectiveness of the proposed schemes.