近期,实验室教师吴承伟第一作者,吴立刚教授作为通讯作者的论文“Deep Reinforcement Learning Control Approach to Mitigating Actuator Attacks”已被控制领域权威期刊Automatica以Regular paper形式录用。
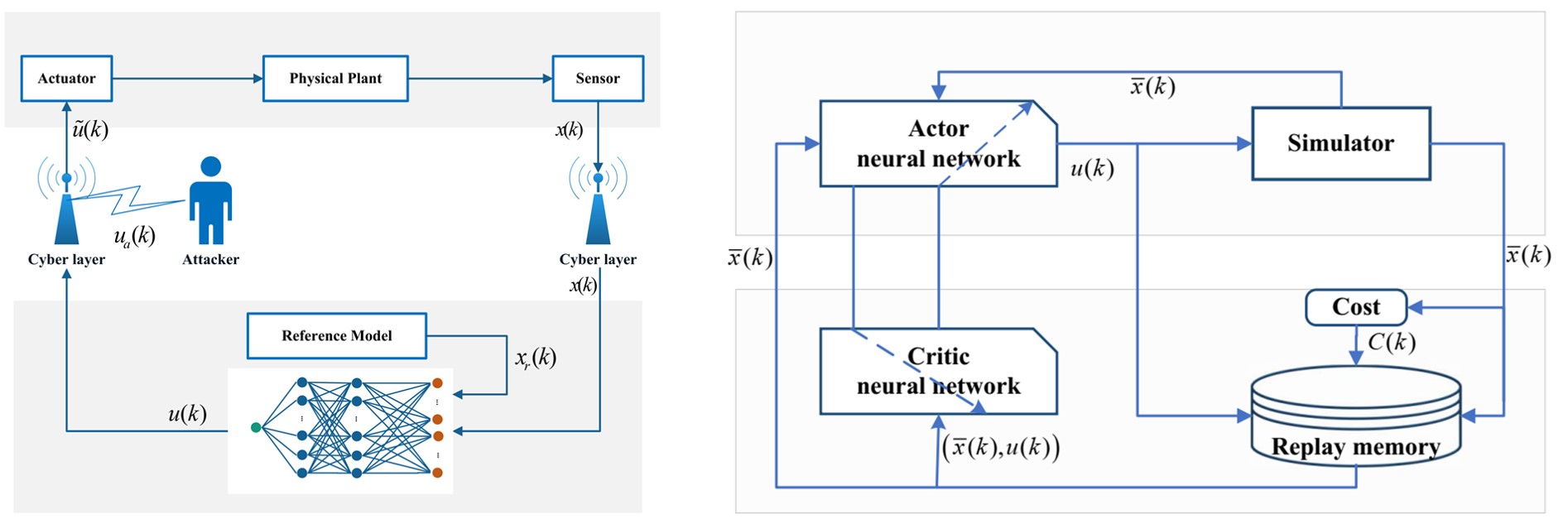
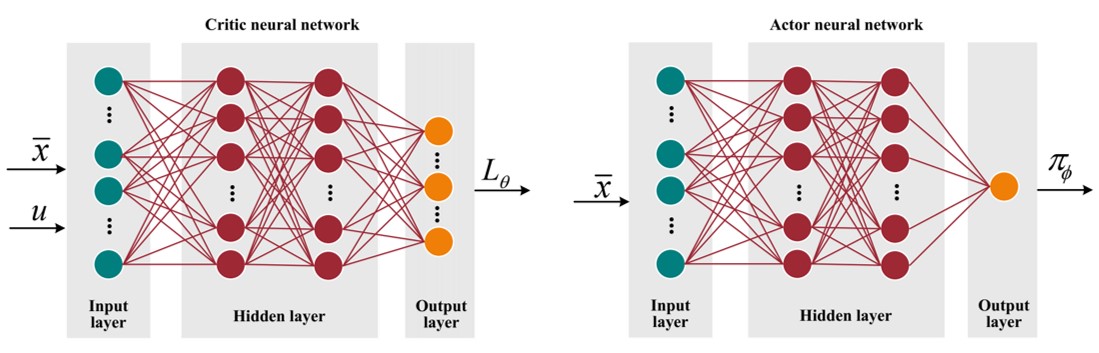
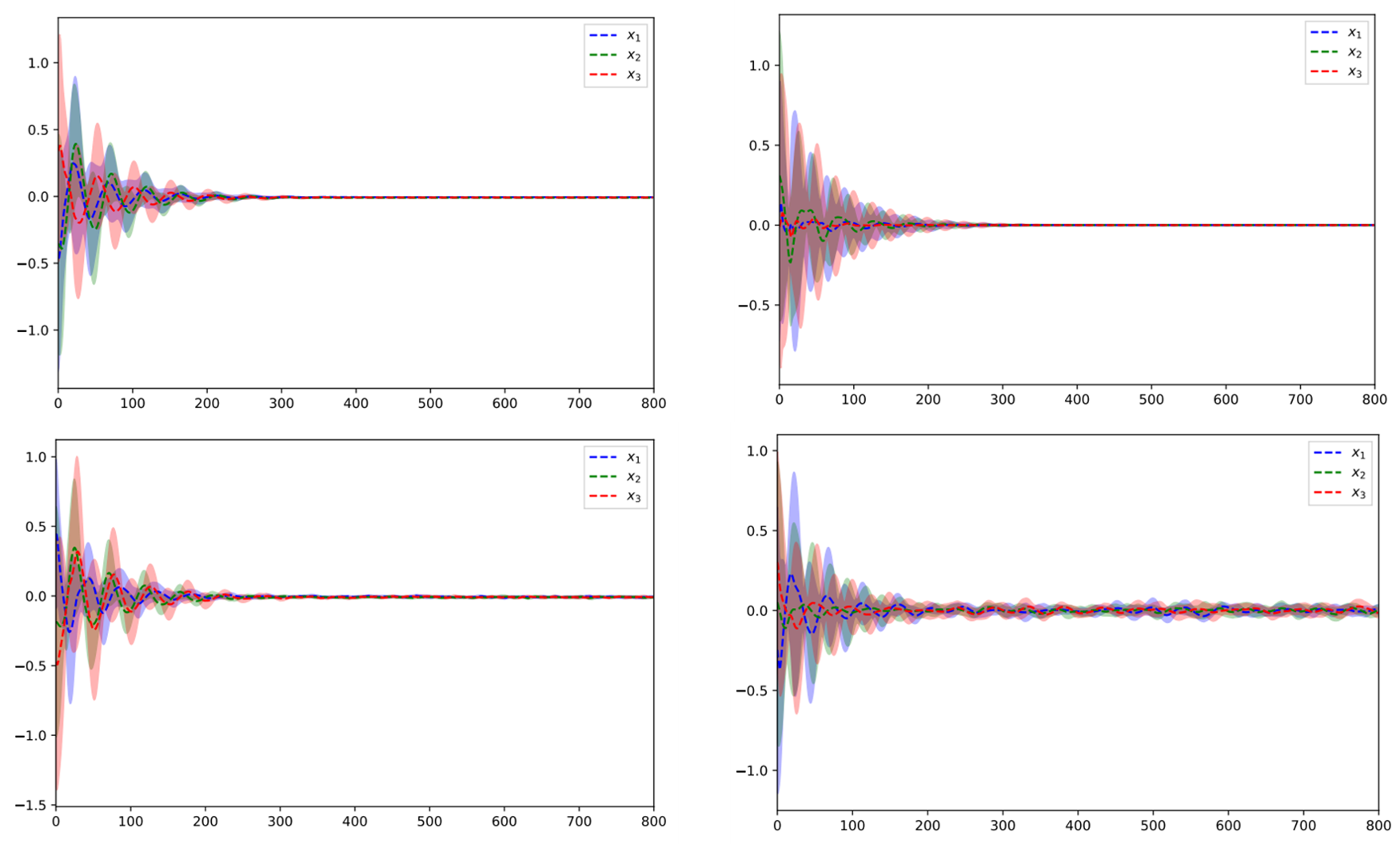
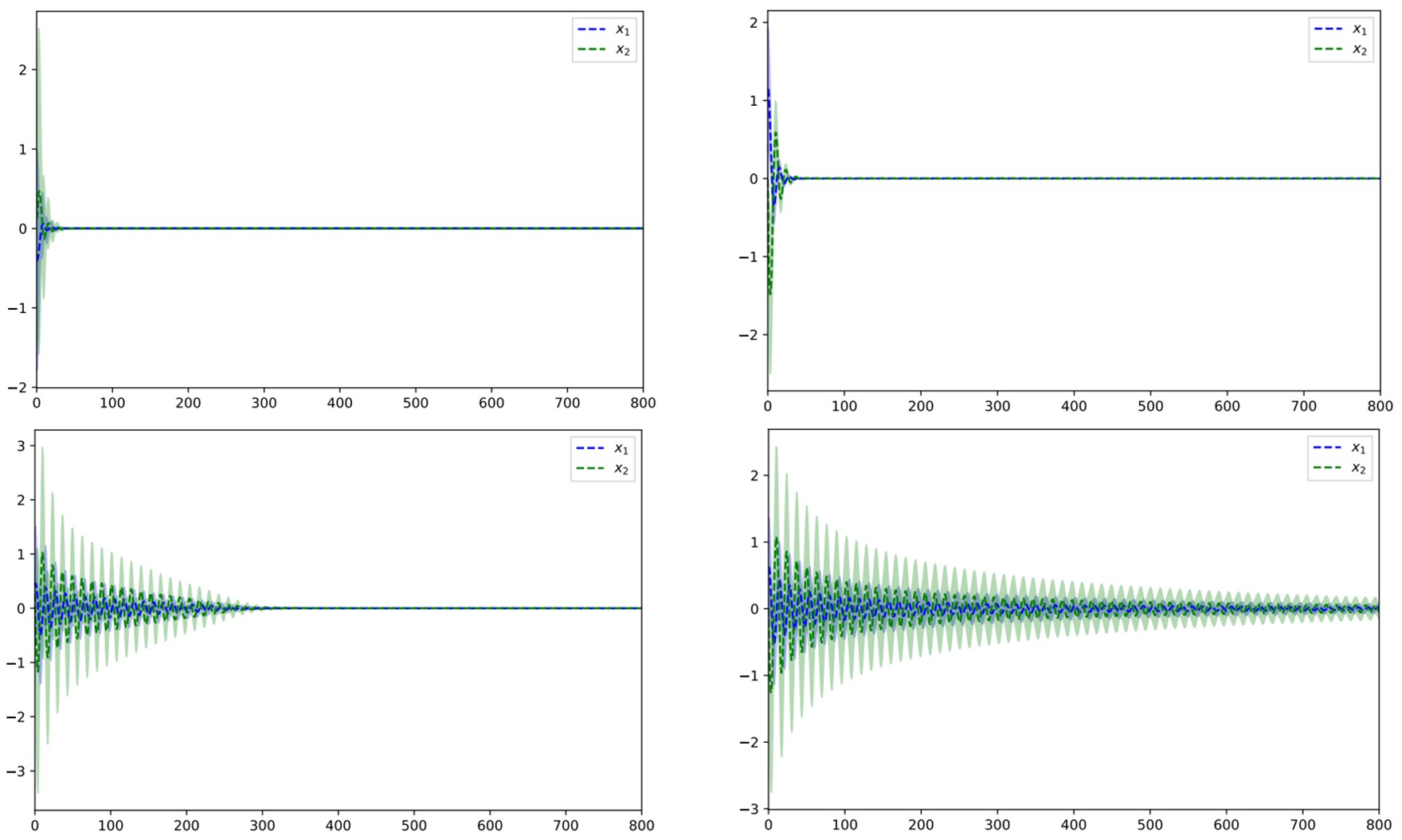
该论文研究了信息物理系统执行器虚假数据注入攻击情形下基于深度强化学习的安全控制问题。本文将受攻击情形下的信息物理系统动态方程描述为一个马尔科夫决策过程,进而提出了一种基于李雅普诺夫函数的柔性actor-critic强化学习算法。本文不仅证明了提出的深度强化学习算法的收敛性,而且解决了系统使用强化学习获得的策略时的稳定性分析问题,给出了稳定性证明。
Abstract
This paper investigates the deep reinforcement learning based secure control problem for cyber-physical systems (CPS) under false data injection attacks. We describe the CPS under attacks as a Markov decision process (MDP), based on which the secure controller design for CPS under attacks is formulated as an action policy learning using data. Rendering the soft actor-critic learning algorithm, a Lyapunov-based soft actor-critic learning algorithm is proposed to offline train a secure policy for CPS under attacks. Different from the existing results, not only the convergence of the learning algorithm but the stability of the system using the learned policy is proved, which is quite important for security and stability-critical applications. Finally, both a satellite attitude control system and a robot arm system are used to show the effectiveness of the proposed scheme, and comparisons between the proposed learning algorithm and the classical PD controller are also provided to demonstrate the advantages of the control algorithm designed in this paper.