近期,实验室博士生邵翔宇作为第一作者,实验室教师姚蔚然作为通信作者的论文“Direct Trajectory Optimization of Free-Floating Space Manipulator for Reducing Spacecraft Variation”已被机器人领域权威期刊IEEE Robotics and Automation Letters录用。
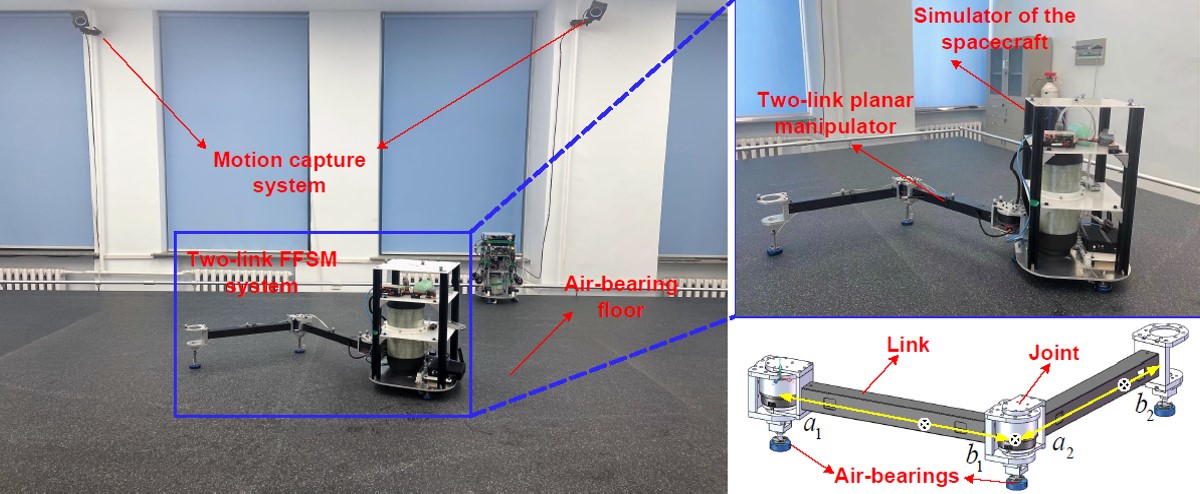
该论文研究了空间漂浮机器人在执行任务期间基座航天器受扰的抑制问题。主要目的是通过规划机器人关节空间的运动轨迹,使得系统沿着该轨迹运动过程中对基座产生的扰动最小。为了提高轨迹规划的计算效率,文章采用自适应Radau伪谱法将优化问题进行离散并将其转换成非线性规划的问题。通过自适应的调整离散过程中分段的个数和每段内节点的个数,避免了高阶多项式的计算。文章搭建了空间机器人地面仿真系统,并进行实验验证了所提方法的有效性。
Abstract
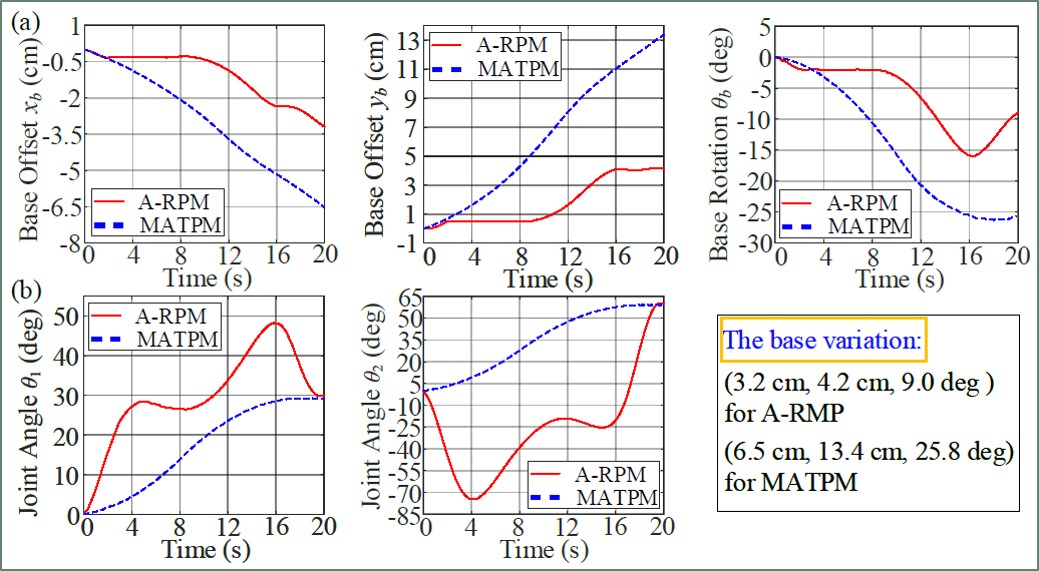
This paper investigates the direct trajectory optimization of the free-floating space manipulator (FFSM). The main purpose is to plan the joint space trajectories to reduce the spacecraft motion due to the joint rotation during the FFSM performing tasks. To improve the calculation efficiency, the adaptive Radau pseudospectral method (A-RPM) is applied to discretize the system dynamics and transform the formulated optimal problem into a nonlinear programming problem (NLP). By adaptively subdividing the current segment and assigning collocation points according to the solution error, high-degree interpolation polynomials are avoided. To verify the effectiveness of the proposed method, a ground micro-gravity platform of the FFSM system is designed by using the air-bearing technique, on which experiments are carried out. The results show that the variation of the base spacecraft is dramatically reduced if the joints rotate along the optimized trajectories.