近期,实验室博士生林昊作为第一作者,实验室教师刘健行教授作为通信作者的论文“Fuzzy Sliding-Mode Control for Three-Level NPC AFE Rectifiers: A Chattering Alleviation Approach” 已被电力电子领域权威期刊IEEE Transactions on Power Electronics录用。
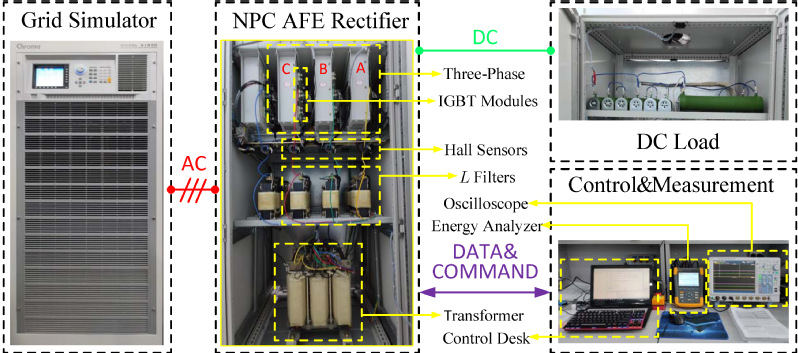
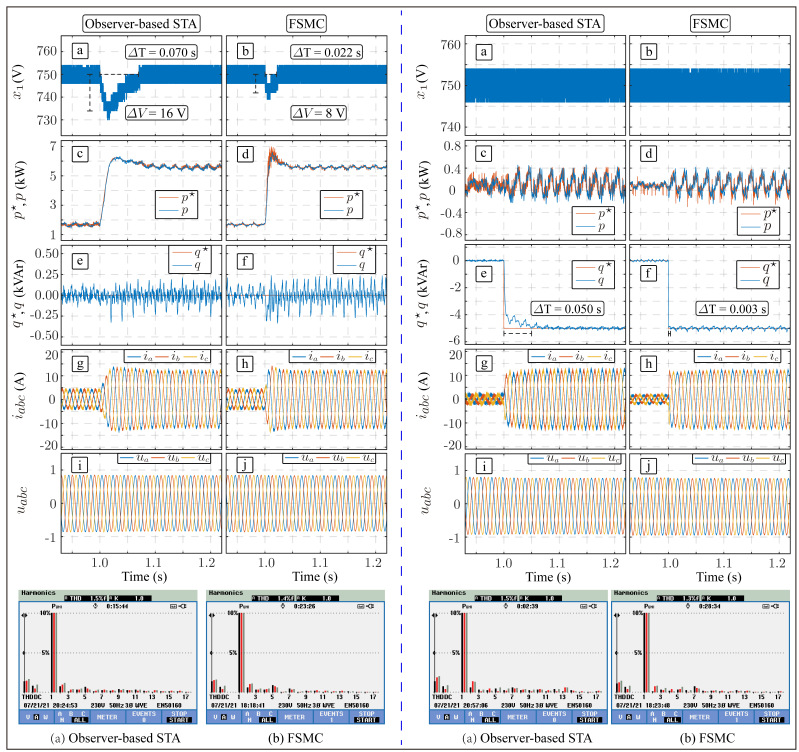
随着工业界对功率变换器愈来愈高的性能需求,滑模控制因其快速动态响应、对参数变化及扰动不灵敏等优点广泛应用于变换器控制领域。为了在保留滑模控制优点的同时抑制其抖振问题,该论文针对三相三电平中点钳位整流器提出了一种由三个控制环组成的模糊滑模控制策略。针对功率跟踪环,提出了一种改进型超螺旋算法,使有功功率和无功功率的跟踪误差在有限时间内收敛至有界区域,保证了系统的动态性能。然后,针对直流侧电压调节环,利用基于超螺旋扩展状态观测器的模糊滑模控制策略,使直流侧电压的调节误差收敛到有界区域。直流侧电压平衡环采用简单有效的比例积分控制器,以减小两个直流侧电容之间的电压差。所提控制策略抑制了滑模控制的抖振问题,提高了系统的直流侧电压调节能力、抗干扰能力和功率跟踪能力。实验结果验证了该策略的有效性和优越性。
Abstract
Due to the high performance requirements of power converters in industrial applications, sliding-mode control has drawn extensive research attention for its insensitivity against external disturbances. In order to ensure this advantage while suppressing the chattering problem caused by discontinuous switching functions, in this paper, a fuzzy sliding-mode control (FSMC) strategy consisting of three control loops is proposed for three-phase three-level neutral-point-clamped active front-end rectifiers. In the power tracking loop, an improved super-twisting algorithm is proposed to enforce the tracking errors of active power and reactive power to bounded regions in finite time and guarantee the transient performance. Next, in the DC-link voltage regulation loop, the regulation error of DC-link voltage converges to a bounded region with a super-twisting extended state observer-based FSMC strategy. A simple but efficient proportional-integral controller is employed in DC-link voltage balancing loop to reduce the voltage difference between two DC-link capacitors. The proposed controller is characterized by attenuated chattering phenomenon and improved DC-link voltage regulation performance, disturbance rejection ability and power tracking performance. Experimental results are provided to verify the effectiveness and superiority of the proposed strategy.