近期,实验室博士生杨柳作为第一作者,导师吴立刚教授作为通讯作者的论文“Event-based Output Feedback Control of Periodic Systems: A Piecewise Impulsive Method”已被国际期刊International Journal of Robust and Nonlinear Control录用。
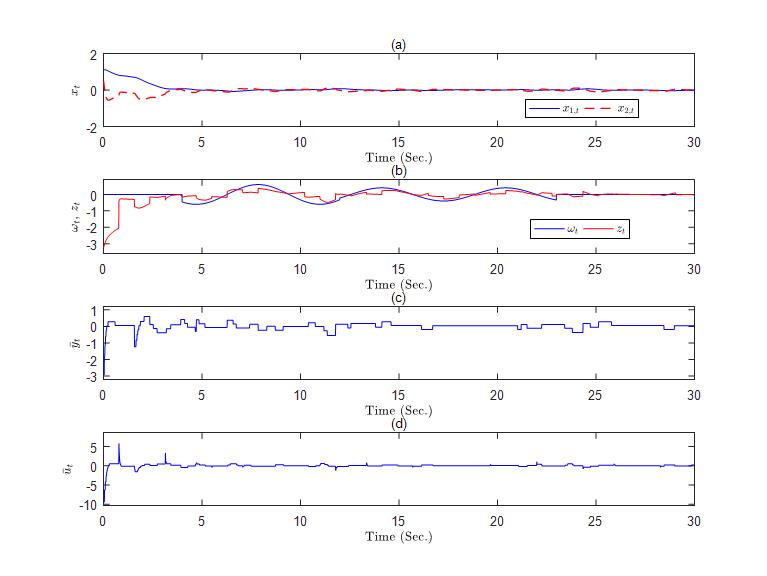
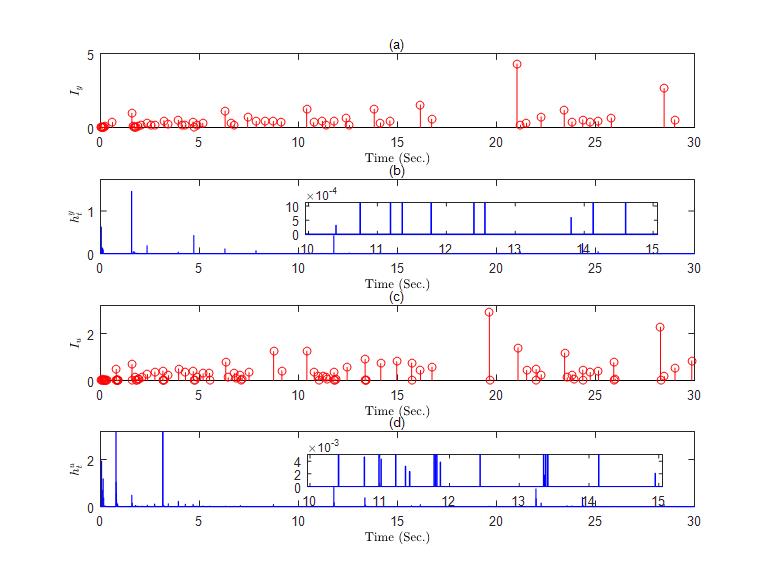
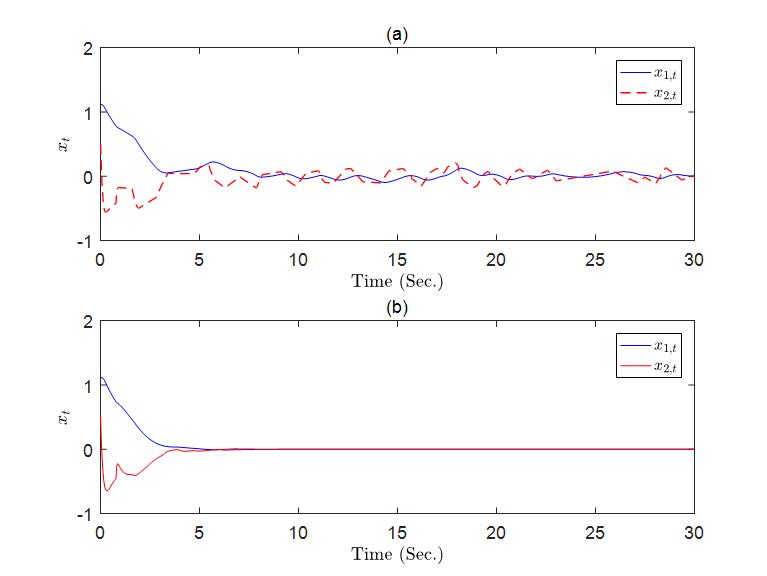
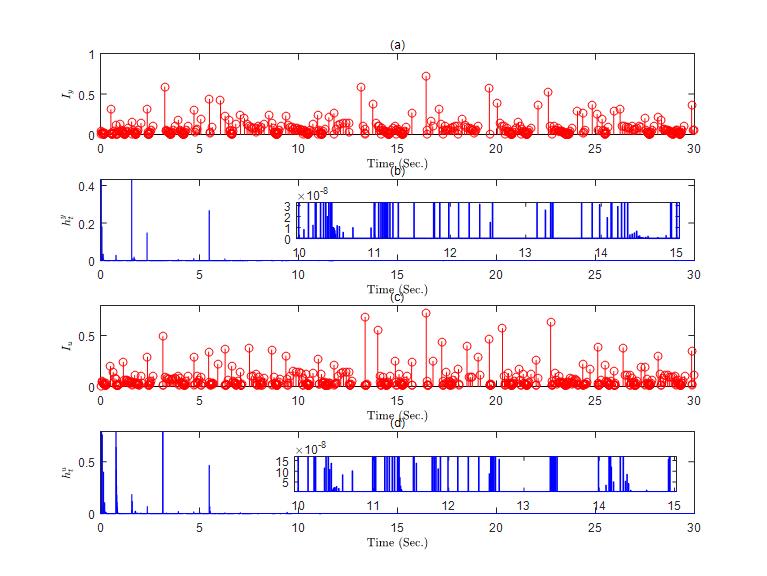
在该文章中,针对网络环境下一类具有外部扰动的周期系统,设计了一种具有周期时变参数的事件触发控制方法。本文采用分段的思想,利用具有有限个常矩阵的若干线性子系统逼近了所考虑的连续时间周期系统,由此降低了理论分析的复杂性。为了减少传感器(或控制器)和控制器(或执行器)之间不必要的数据传输,通过输出反馈设计了新的事件触发机制。设计了特殊的参数来消除Zeno行为,并根据设计条件得到了最小触发间隔。然后,将该事件触发周期分段系统建模为脉冲周期分段系统,进而分析了脉冲周期分段系统的有界稳定性和L∞性能。此外,采用变量代换的方法得到了事件触发控制器的增益。最后,通过一个应用实例验证了该控制方法的有效性。
Abstract
In this article, a new event-triggered control with periodic time-varying parameters is designed to stabilize a class of periodic systems with exogenous disturbances in a network environment. The continuous-time periodic system is approximated by some linear subsystems with finite-number constant matrices based on a piecewise method. It can thus reduce the complexity of theoretical analysis. To tackle the reduction of unnecessary data transmission between the sensor (or controller) and the controller (or actuator), new event-triggering mechanisms are designed via output feedback. Special parameters are designed to eliminate Zeno behavior, and the minimum triggering interval is obtained according to the designed condition. Then, an event-triggered periodic piecewise system is modeled as an impulsive periodic piecewise system. The bounded stability, as well as the L-infinity performance of the impulsive periodic piecewise system, are analyzed. Furthermore, the gains of the event-triggered controller are obtained by a method of variable substitution. Finally, the validity of the proposed control is demonstrated by an application example.