近期,实验室博士生吴承伟作为第一作者,导师吴立刚教授作为通讯作者的论文“Learning Tracking Control for Cyber-Physical Systems”已被国际权威期刊IEEE Internet of Things Journal录用。
该论文针对拒绝服务攻击情形下的信息物理系统,提出了基于强化学习的安全跟踪控制策略设计算法,分析了网络攻击情形下代数黎卡提方程解的存在性,并给出了存在条件,解决了物理模型参数未知情形下信息物理系统的安全跟踪控制设计问题。其创新性体现在:该成果同时设计了on-policy和off-policy两种基于强化学习的安全跟踪控制算法,突破了已有相关成果对系统模型参数信息依赖的瓶颈。
Abstract
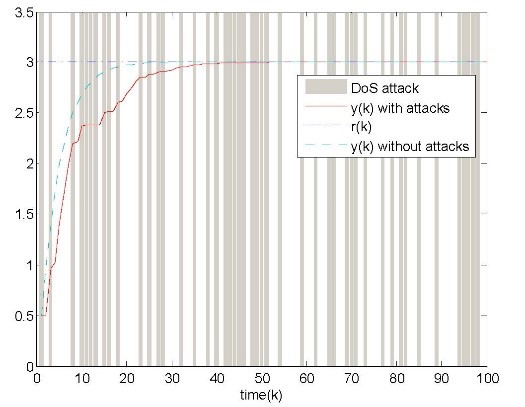
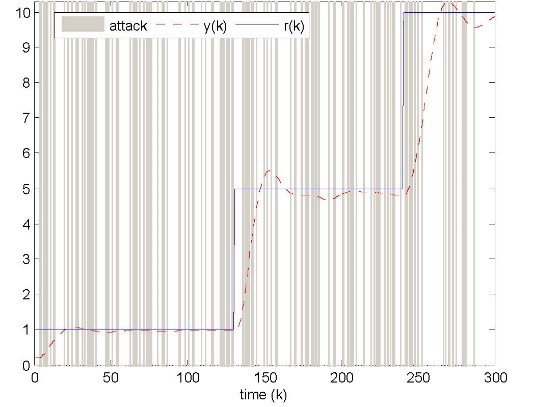
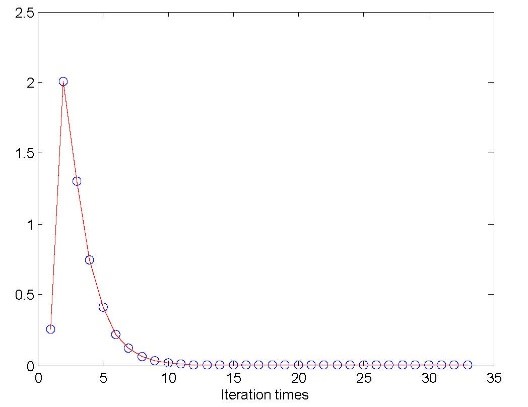
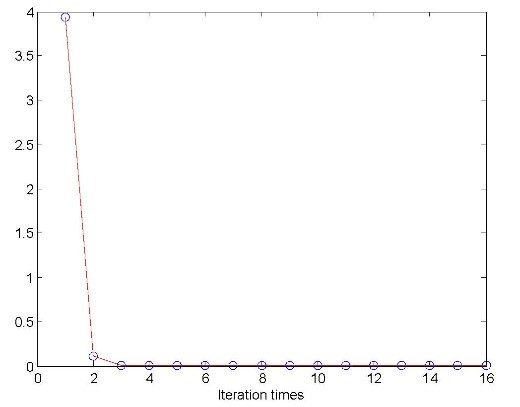
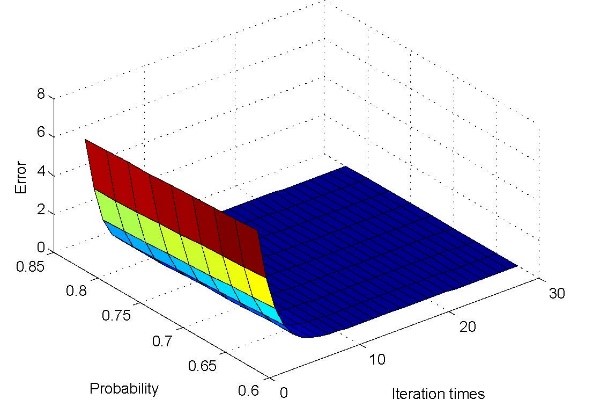
This paper investigates the problem of optimal tracking control for cyber-physical systems (CPS) when the cyber realm is attacked by denial-of-service (DoS) attacks which can prevent the control signal transmitting to the actuator. Attention is focused on how to design the optimal tracking control scheme without using the system dynamics and analyze the impact of DoS attacks on tracking performance. First, a Riccati equation for the augmented system including the system model and the reference model is derived under the framework of dynamic programming. The existence and uniqueness of its solution are proved. Second, the impact of the successful DoS attack probability on tracking performance is analyzed. A critical value of the probability is given, beyond which the solution to the Riccati equation cannot converge. The tracking controller cannot be designed. Third, reinforcement learning is introduced to design the optimal tracking control schemes, in which the system dynamics are not necessary to be known. Finally, both a dc motor and an F16 aircraft are used to evaluate the proposed control schemes in this paper.