近期,实验室教师姚蔚然作为第一作者的论文“Trajectory Consensus for Coordination of Multiple Curvature-Bounded Vehicles”已发表在控制领域权威期刊IEEE Transactions on Cybernetics上。
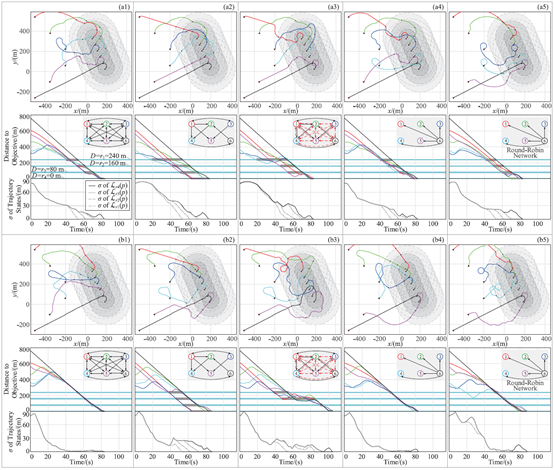
该论文研究了轨迹曲率有界的多无人车时间扩展轨迹协调问题,旨在同时协调无人车在多个未来时间点的状态。文章创新地将无人车规划轨迹的几何特征进行了参数化,并将时间扩展轨迹协调问题转化为一种多耦合状态变量一致控制问题。为了解决这种特殊的一致性问题,在传统的一致性模型中加入了基于结构化同伦建立的状态变量到规划轨迹几何结构的映射,建立了同伦一致模型。仿真结果表明,本文提出的同伦一致方法,可以同时实现了无人车规划轨迹在多个未来时间点的一致。
Abstract
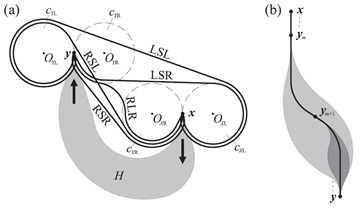
This article addresses the trajectory consensus problem of coordinating the trajectories of vehicles at multiple future time points. The objective is the consensus of the geometry of the vehicles’ planned trajectories. The geometric feature of trajectories is parameterized by a set of trajectory states defined as required lengths along the trajectory to reduce the distance to its ending point to specific values. To solve this special consensus problem involving coupled state variables, the conventional consensus model is extended by attaching it to a mapping from the state variables to the trajectory’s geometry. This mapping is established using a homotopic structure that creates a compact and efficient form for the mapping. The geometry of the homotopic structure is based on the shapes of its envelopes, and the elements in the structure are derived from their deformation. Through a homotopic search in the structure, an asymptotic consensus of trajectory states is achieved. Simulation results show the proposed coupled state consensus method can achieve better performance on the consensus of multiple vehicles than the conventional isolated state consensus method.