近期,实验室博士生沈肖宁作为第一作者,导师刘健行教授作为通讯作者的论文“High-Performance Second-Order Sliding Mode Control for NPC Converters”已发表在工业信息领域权威期刊IEEE Transactions on Industrial Informatics上。
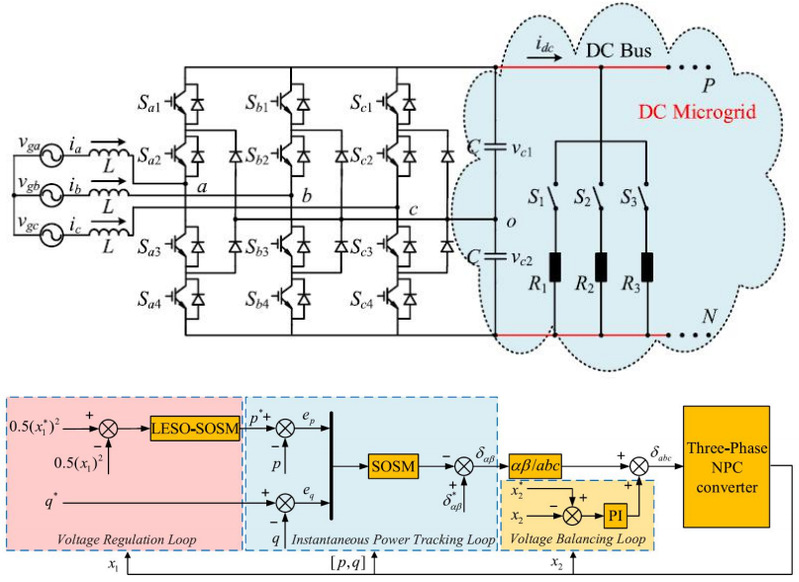
该论文针对有源前端三电平中性点钳位变换器的控制问题,提出了一种基于扩张状态观测器的高性能二阶滑模控制方法,解决了传统PI控制算法在对三电平中性点钳位变换器进行控制时,存在的抗干扰性能较差,动态响应较慢的问题,其创新性体现在:在直流电压调节环中,设计了二阶滑模控制器来快速地调节直流母线电压,显著提升了启动过程以及电压阶跃阶段的动态响应速度。同时,由于外部不确定干扰的存在,因此基于二阶滑模控制器加入了一种线性扩张状态观测器来抑制它;在瞬时功率跟踪环中,采用一种简单有效的直接功率控制策略来实现功率跟踪的目标,从而简化了内部环路的控制过程。另外,设计了二阶滑模控制器以确保获得具有快速动态特性和低谐波失真的交流电流;最后,在电压平衡环路中,使用了PI控制器来实现直流侧电容器的电压平衡。
Abstract
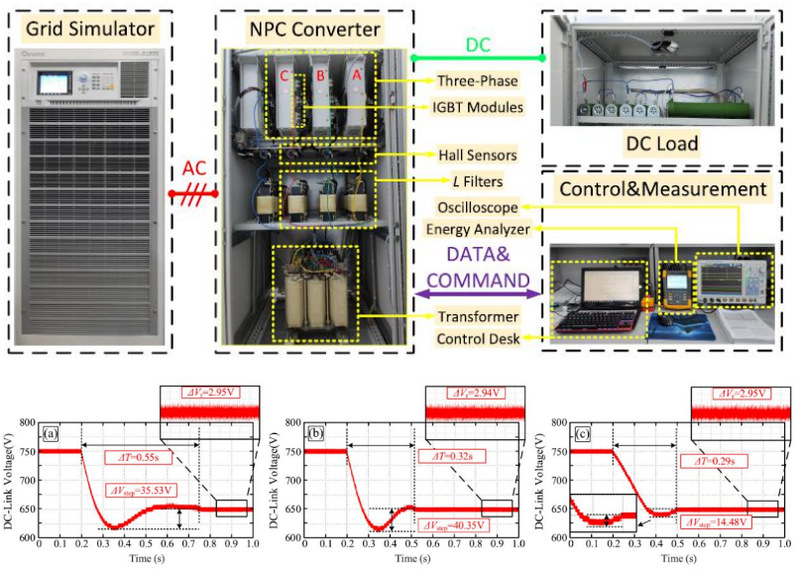
In this article, a linear extended state observer (LESO) based second-order sliding mode (SOSM) control strategy with the direct power control is proposed for a three-phase neutral-point-clamped (NPC) power converter connected to a dc microgrid. Comparing with the PI control method, the proposed approach implements the advanced SOSM controller into the voltage regulation loop and instantaneous power tracking loop to enhance the dynamic and steady state performance. Furthermore, saturation function is applied in the SOSM method to weaken the chattering phenomenon. On the other hand, since the dc load is regarded as an external disturbance, an efficient LESO is designed in the voltage regulation loop to reject this disturbance. The design process of the proposed control strategy is shown based on the continuous averaged model of the NPC converter. Finally, comparison experiments among PI, LESO-based PI, and proposed LESO-based SOSM control strategies are implemented, which validate the superiority of the proposed approach.