近期,实验室博士生马仁杰作为第一作者,阿德莱德大学石碰教授和导师吴立刚教授分别作为第二、第三作者的论文“Sparse false injection attacks reconstruction via descriptor sliding mode observers”已发表在控制理论领域权威期刊IEEE Transactions on Automatic Control上(DOI:10.1109/TAC.2020.3043311)。该论文针对遭受稀疏故障注入攻击的信息物理融合系统,提出了基于蛮力搜索的切换阻塞广义滑模观测器方法,解决了系统在传感器和执行器联合攻击下的安全状态与攻击信号实时估计问题,其创新性体现在:利用笛卡尔积描述所有潜在的组合攻击模态,结合切换阻塞搜索来获得对相应攻击信号通道的定位。分别建立全阶和降阶广义滑模观测器,通过设计基于观测误差的在线自适应切换逻辑,得到有效的攻击弹性安全估计策略。
Abstract
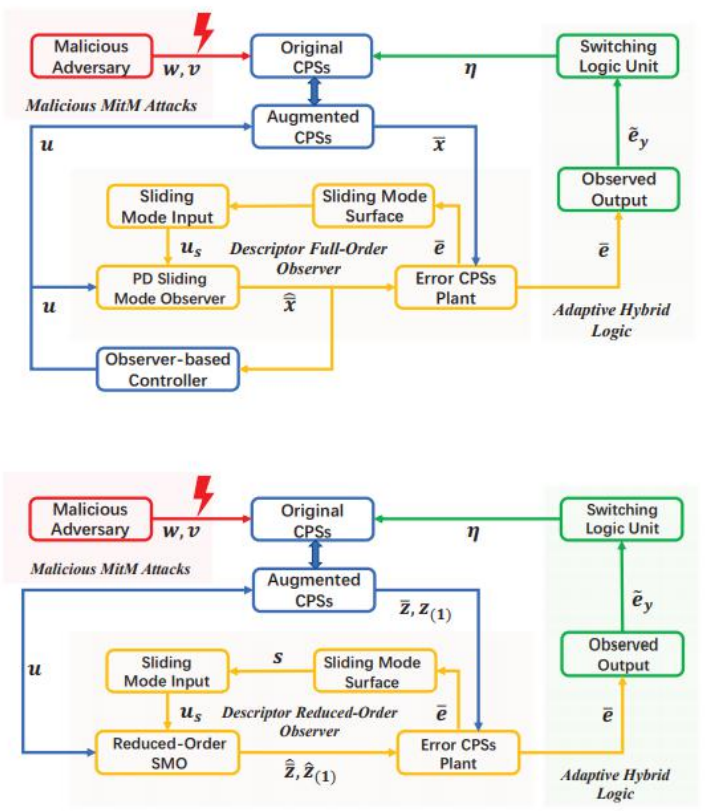
Cyber-physical systems (CPSs), acting as the backbone of Industrial 4.0, may suffer from false injection attacks launched by adversary for degrading system performances. In this paper, we concentrate on investigating secure reconstruction of CPSs. Firstly, the combinational attack mode is potentially identified by means of adaptive counteraction searching. Next, the sparse injection attacks are effectively reconstructed while ensuring the correctness of state estimation in the light of full-order and reduced-order switched descriptor sliding mode observers, respectively. Moreover, two numerical examples are given to verify the applicability of our theoretical derivation.