近期,高亚斌博士作为第一作者,导师吴立刚作为通讯作者的论文“State estimation and self-triggered control of CPSs against joint sensor and actuator attacks”已发表在控制领域权威期刊Automatica上。
该论文针对信息物理联合系统(CPSs)传感器和执行器受到联合完整性攻击的现象,提出了一种基于矩阵枚举和delta域估计器的状态估计方法,解决了攻击信道数目变化的联合攻击下CPSs状态估计问题,其创新性体现在:(1)建立了delta域统一框架下线性CPSs与基于稀疏观测条件的联合攻击模型;(2)构造了基于圆域稳定性判据和耗散性指标的CPSs稳定性条件,以及状态估计器和控制器参数求解依据;(3)设计了一种基于多重观测的估计器、自触发控制器及相应的触发机制,用于减轻通信负担和改善状态估计性能。
Abstract
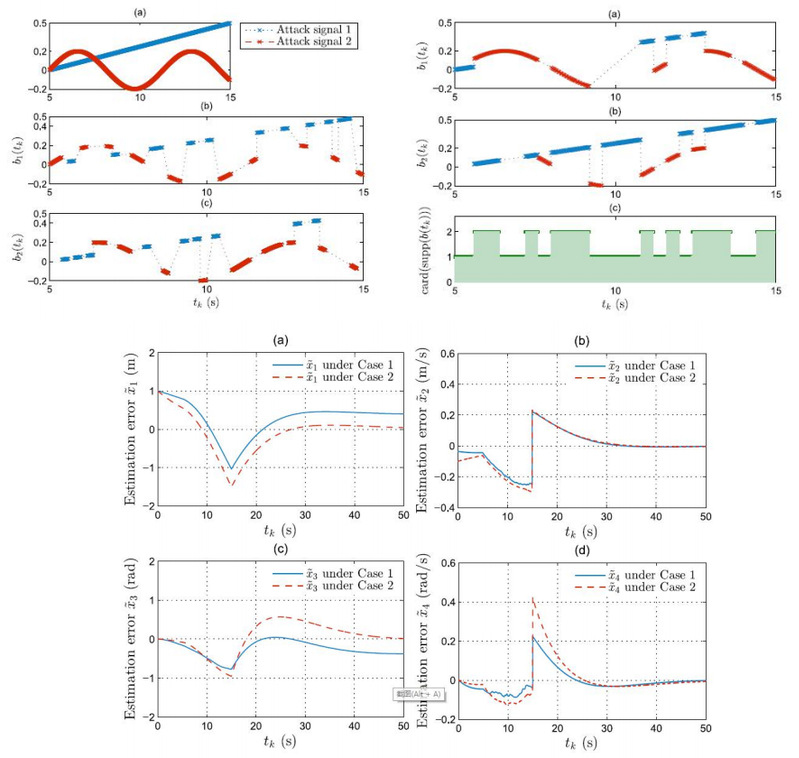
In this paper, a practical state estimation strategy against joint sensor and actuator attacks is proposed for cyber-physical systems (CPSs). The CPSs are formulated based on delta operator for the requirement of real control systems with high-sampling or variable-sampling periods. The attacks fulfilling sparse observation condition are supposed to be randomly injected into both sensor and actuator units. Various numbers of attacks on sensors and actuators can be properly handled. Based on multiple observations of the attacked measurements, a new estimator in delta-domain is proposed to estimate the states of the attacked CPS. The convergence of the corresponding estimation error is analyzed based on pole assignment analysis and some matrix equality constraints. Further, by utilization of a dissipativity approach, estimator-based time-driven controller and self-triggered controller are designed for the enhancement of the estimations and the resource saving. Simulations for the joint attack scenario are provided to testify the applicability and effectiveness of the proposed estimation methods.