近期,实验室教师姚蔚然作为第一作者,吴立刚教授作为通讯作者的论文“Time-Extended Consensus for Multi-Agent Non-Interactive Collaboration”已被控制领域权威期刊Automatica以Regular Paper形式录用。
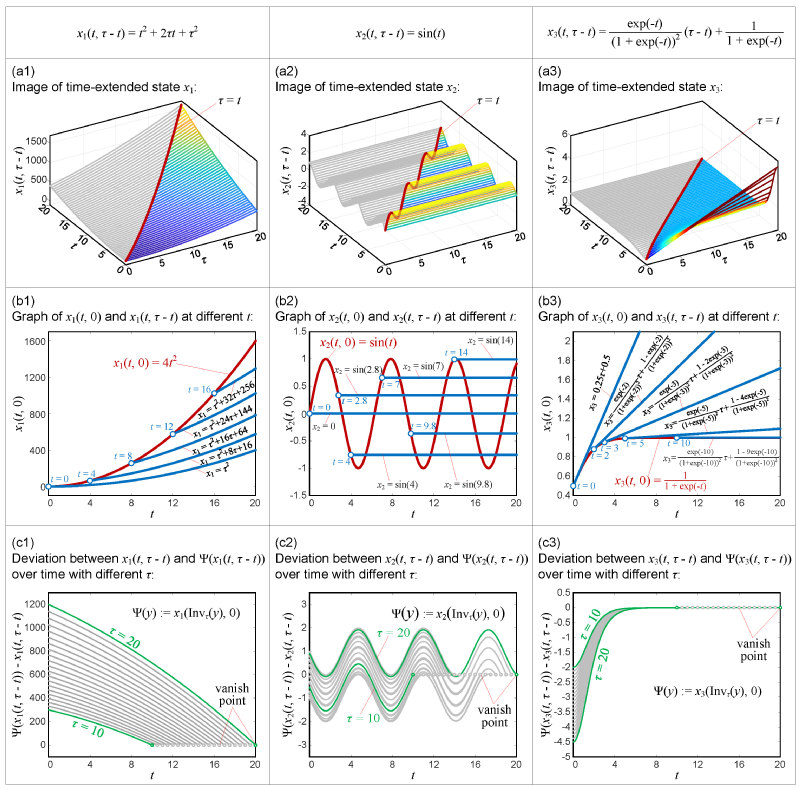
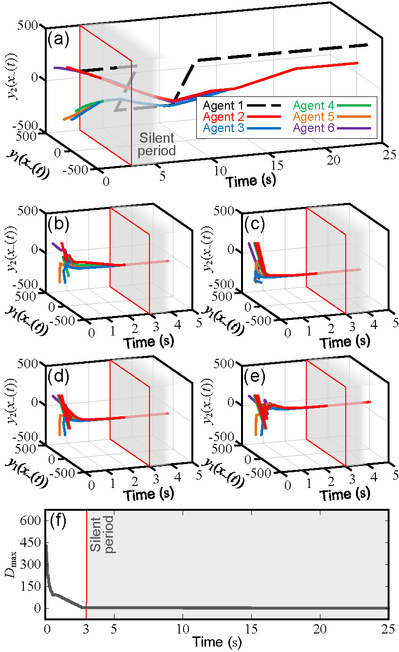
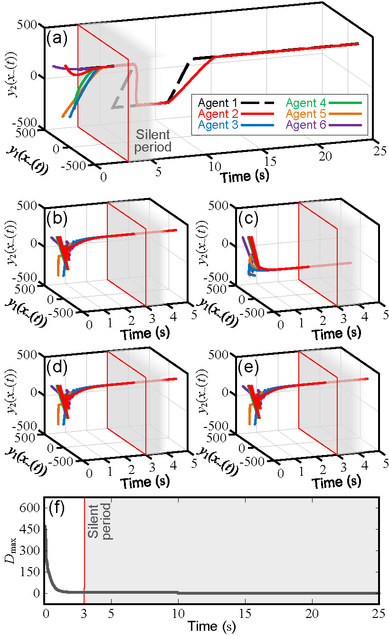
该论文提出了一种基于计划的协同的广义形式,即时间扩展一致问题,适用于进入无交互状态的多智能体系统。描述了受Lipschitz条件约束的系统实现时间扩展共识的条件。利用拖曳矢量场的线性叠加构建了时间扩展一致的控制协议。从到达一致的速度方面研究了基于所提出控制协议的时间扩展状态收敛过程。仿真结果证明了所提出的时间扩展一致方法的优点和局限性,以及它与传统多智能体状态同步的比较。
Abstract
Plan-based coordination, which can fill the vacancy of control during the communication silent periods, improves the ability of agents' independence and reduces the requirement of communication resources. This paper presents a generalized form of plan-based coordination, namely the time-extended consensus problem, which is applicable to multi-agent systems entering non-interaction state. Conditions for achieving time-extended consensus are described for systems subject to the Lipschitz condition. A control protocol for time-extended consensus is constructed using linear superposition of drag vector fields. The convergence process of time-extended states based on the proposed control protocol is investigated in terms of the speed of approaching consensus. Simulation results demonstrate the advantages and limitations of the proposed method for time-extended consensus and how it compares to conventional multi-agent state synchronization.