平台简介:
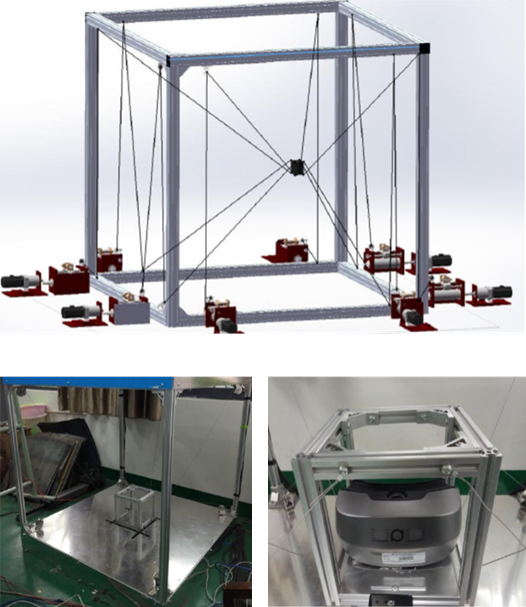
高精度伺服运动控制平台主要面向光机电一体化设备中的高精度伺服控制算法验证工作。以经典的三环调速系统为基础,研究先进控制算法在伺服控制中应用的可能性。该平台有三个部分构成,其一是柔性绳驱动的伺服控制平台(可实现过驱、欠驱等状态下的空间3D定位);其二是工业伺服中常用的XYZ微米级定位平台(可实现双轴同步、多轴协同条件下的微米级定位);其三是电拖运动控制平台(由伺服电机、功率变换部分及Dspace平台构成)。
开展试验:
并联式绳驱机器人的多自由度精准控制——验证绳驱伺服系统的轨迹规划、力位混合控制、阻抗控制
X-Y-Z微米级大理石伺服平台轮廓跟踪——验证高速高精密大理石平台的轮廓跟踪控制,多轴协同控制
对拖电机动静态综合测试——验证电机静动态综合特性测试、电机拖动先进控制算法测试、无速度传感器电机控制测试等