平台简介:
机器人控制系统面向智能机器人驱控技术算法验证提供验证。该系统由一台UR5,一台UR3,一台珞石机器人以及自行搭建的双臂机器人平台构成。可以提供基于ROS的机械臂仿真试验、机械手的力位混合柔顺控制、非合作目标运动仿真及模拟、空间自由悬浮机械臂的协同抓取以及视觉伺服等验证工作。为工业机器人、空间机器人及智能机器人等技术应用提供坚实的控制算法保障。
开展试验:
空间非合作目标运动模拟实验——模拟类似空中加油、飞行器变轨等3D空间的非合作目标运动
空间双臂机器人协同柔性抓捕验证——验证了空间自由悬浮机械臂的轨迹规划和力位混合控制
基于ROS的机器臂仿真分析系统——搭建自己的机器臂视觉伺服仿真分析系统
R-θ型硅片传输机器人控制——验证末端振动抑制算法及轨迹规划算法
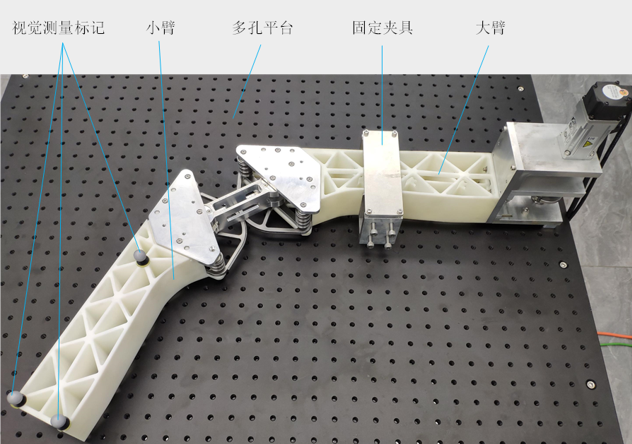
柔性绳牵机械臂控制系统——验证由柔性绳索控制的机械臂伺服控制策略