近期,实验室博士生付金宇作为第一作者、实验室教师姚蔚然作为通讯作者的论文“An FTSA Trajectory Elliptical Homotopy for Unmanned Vehicles Path Planning with Multi-objective Constraints”已被国际权威期刊IEEE Transactions on Intelligent Vehicles录用。
本文从无人机路径长度的均衡出发,研究了一种固定时间同时到达(FTSA)问题。设计了一种新的轨迹椭圆同伦方法(TEHM)来解决多目标约束环境下无人车的FTSA问题。考虑无人车避障和运动学约束,选择轨迹椭圆同伦进行路径规划。所获得的轨迹同伦同时保证了避障和运动稳定性。为了处理非合作和动态避障问题,提出了一种具有FTSA约束的轨迹椭圆同伦分解算法。基于TEHM和TEHD,设计并实现了一种多无人车固定时间正三角形编队算法。仿真和实验验证了所提出方法的性能,并显示了如何在障碍物和运动约束下获得固定时间到达编队。
Abstract
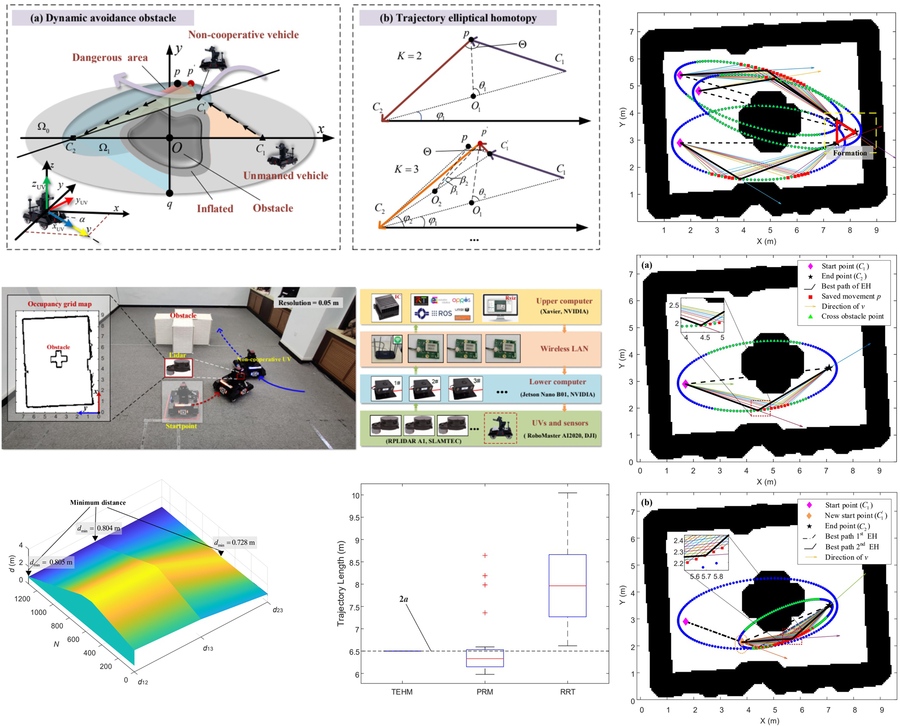
This article investigates a fixed-time simultaneous arrival (FTSA) problem in terms of the equilibrium of path lengths of unmanned vehicles. A novel trajectory elliptical homotopy method (TEHM) is designed to solve the FTSA problem of unmanned vehicles in a multi-objective constrained environment. Considering the constraints of obstacle avoidance and kinematics of unmanned vehicles, the trajectories elliptical homotopy is selected for path planning. The obtained trajectory homotopy guarantees obstacle avoidance and motion stability at the same time. To handle the non-cooperative and dynamic obstacle avoidance, a trajectory elliptical homotopy decomposition (TEHD) algorithm is proposed with an FTSA constraint. Based on the TEHM and TEHD, a multiple unmanned vehicle fixed-time regular-triangle formation algorithm is designed and implemented on real vehicles. Simulations and experiments validate the performance of the proposed methods and show how fixed-time arrival formation under obstacles and kinematic constraints was obtained.