近期,实验室博士生邵翔宇作为第一作者,导师吴立刚教授作为通讯作者的论文“Adaptive Sliding Mode Control for Quadrotor UAVs with Input Saturation”已被国际权威期刊IEEE/ASME Transactions on Mechatronics录用。
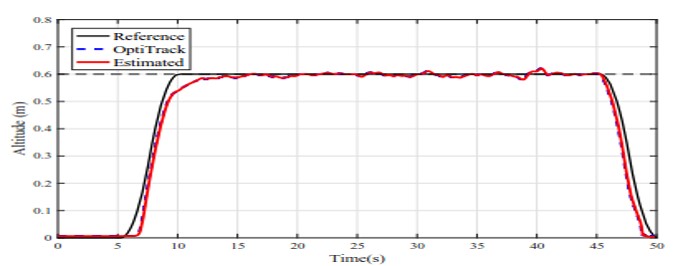
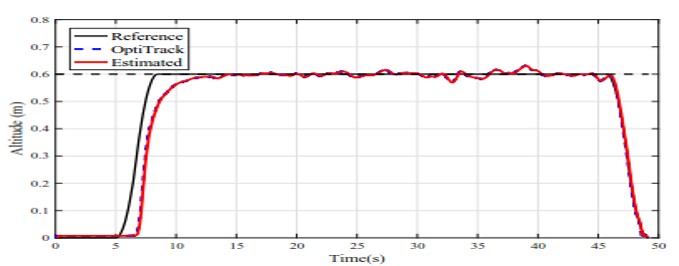
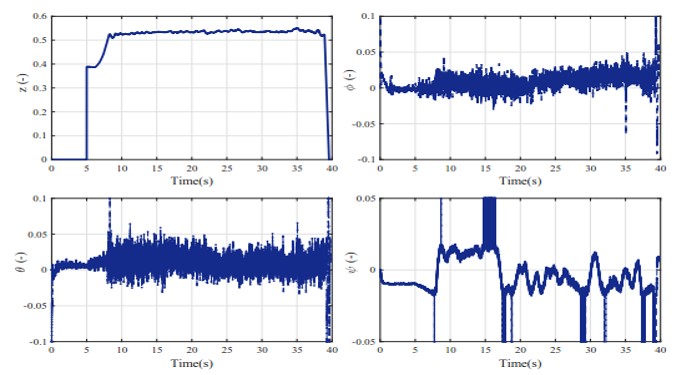
该论文针对四旋翼的姿态稳定和高度控制问题,提出了一种新型自适应滑模控制方法。该控制方法充分考虑到了四旋翼的输入饱和、外部扰动和系统不确定性等因素的影响,通过设计自适应算法对扰动和输入饱和项进行补偿,保证了系统的稳定性,显著提高了系统对扰动和不确定性的抑制性能。该论文的主要贡献是考虑到了四旋翼实际工作过程中存在的建模误差、外部扰动和输入受限等问题,为四旋翼的内环控制问题提供了一种可行控制策略。和传统控制方法相比,该论文所提方法在具有抗饱和性能的同时,提高了四旋翼内环控制时系统的响应速度,减小了系统的超调和稳态误差。此外,该论文采用切换滑模面避免了传统终端滑模面中存在的奇异问题。最后,论文通过仿真和实物实验对所提方法的有效性和可行性进行了验证。实验结果表明:采用所提控制方法,在定位实验和轨迹跟踪实验中系统均方根误差分别减小了34.91%和30.11%。
Abstract
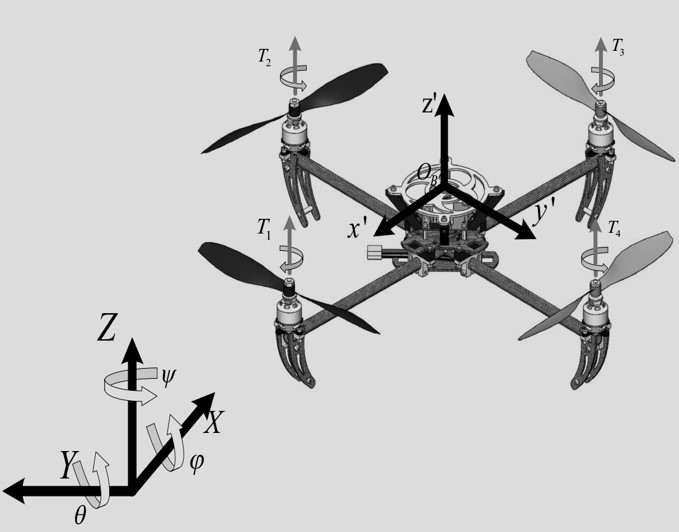
In this paper, a novel adaptive sliding mode control (ASMC) strategy is presented for attitude and altitude stabilization of a quadrotor unmanned aerial vehicle (UAV), where the input saturation is taken into consideration. The nonlinear dynamic model of quadrotor UAV subject to system uncertainty and external disturbance is firstly derived using the Euler-Lagrange mechanical equation. To ensure system stability, as well as eliminating the negative effects of saturation features, a saturated adaptive sliding mode control law (ASMCSAT) is proposed, which takes advantages of the sliding mode control and the adaptive control. Compared with conventional control strategies, better tracking performance and disturbance and uncertainty rejection can be achieved with the root mean square of the tracking error (RMSE) being reduced by 34.91% in the vertical take-off and 30.11% in the trajectory tracking. Simulations and experiments are provided to verify the effectiveness and practicability of the proposed control method.