近期,实验室刘健行教授作为第一作者,实验室吴立刚教授作为通讯作者的论文“Sliding Mode Control of Grid-Connected NPC Converters Via High-Gain Observer”发表在工业电子领域权威期刊IEEE Transactions on Industrial Electronics上。
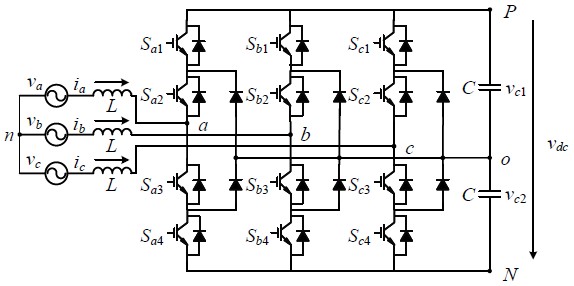
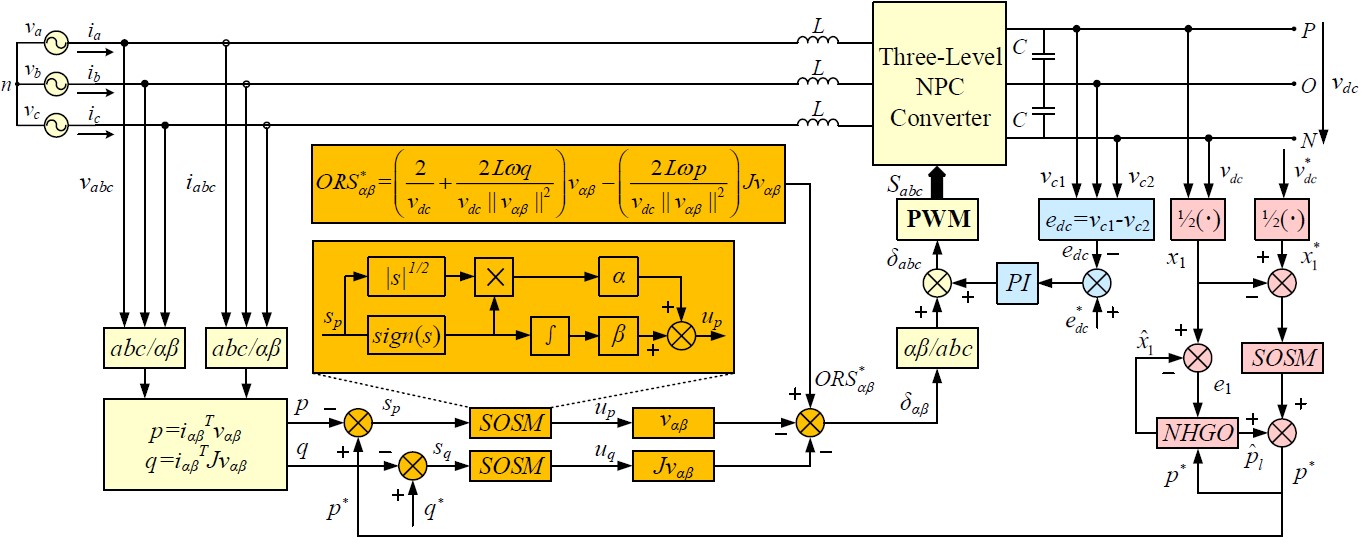
该论文针对有源前端三电平中性点钳位变换器的控制问题,提出了一种基于非线性高增益观测器的滑模控制方法,解决了使用传统观测器在对外界扰动进行抑制的时候,容易受到测量噪声的影响因而抗扰动性能受到限制的问题,其创新性体现在:对三电平中性点钳位变换器进行控制时,基于二阶滑模算法加入一种非线性高增益观测器以抑制外界扰动。常规的基于观测器的控制算法对于测量噪声十分敏感,并且通常只能通过减小观测器增益的方法来防止引入噪声,但是这会牺牲观测器的性能。该论文使用的非线性高增益观测器技术采用时变的增益,即瞬态时使用高增益而稳态时使用低增益,从而最大程度地减小了测量噪声对系统的不利影响以及对观测器性能的限制。此外,该论文还给出了其算法的参数整定方法,进一步简化了其实现过程。
Abstract
In this paper, a nonlinear high-gain observer (NHGO) based second-order sliding mode (SOSM) control strategy is proposed for the three-phase three-level neutral-point-clamped (NPC) converter. This controller applies the advanced SOSM algorithm both in the voltage regulation loop and in power tracking loop, which provides a fast dynamic for the dc-link voltage, and also assures a good steady state behavior for the NPC converter. Additionally, a NHGO technique is implemented in the voltage regulator combining with the SOSM algorithm. The conventional observer-based controllers suffer from the destructive effects of measurement noise, and it can only be addressed by diminishing the observer gain, which sacrifices the observer property. The NHGO technique adopts a time varying gain, that is, high gain in transient while low gain in steady state, which minimizes the adverse influence of measurement noise. The tuning method of the proposed NHGO-based SOSM controller is given to simplify the implementation process. Finally, the simulation and experimental results of the proposed control scheme for the NPC converter are given and compared with the conventional PI controller as well as the well-known linear extended state observer-based control method, which validates the feasibility and superiority of the proposed controller.